
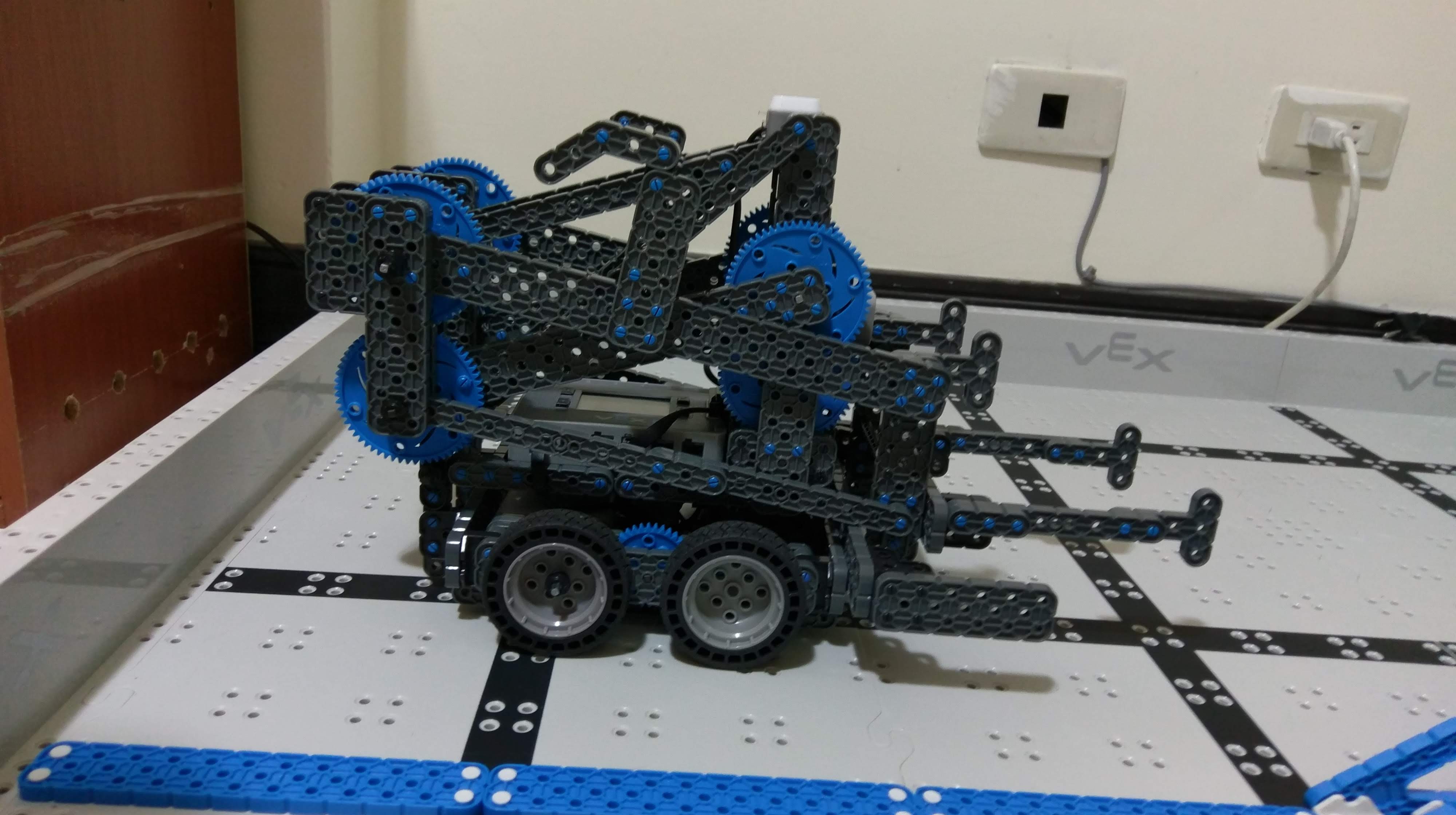
I finally got to build a new robot. I named it 101, after the famously tall skyscraper in Taipei. As we discovered in the previous posts, the Flex robot (even after improvements) couldn’t reach high enough to pick up the bonus hubs. This wasted precious time, knocking the hub off the tower and then having to drive to where it landed, and maybe even have to turn it upright again.
The new robot was designed from the start to be tall enough to directly pick up the yellow bonus hubs. The first prototype in the pic above worked, but it was oversize as per the challenge rules. I had to modify the grabber and also move the lift tower to the back in order to comply with the 508 mm max length rule.
First I had to make the push frame. If one makes it too wide, one can push many hubs, but it is very hard to drive and maneuver. I fitted two hubs in the frame and figured that one could conceivably also push a third in front of the other two.

As for making a high hanging robot, I moved the hook(s) to the bottom of the arm. This enabled it to easily hang more than 4 inches high. I kept the gearbox design mostly the same as the one I used for Flex. This design has ample torque to lift the robot.

I also had to know 101 would be tall enough, left I’m measuring to see if it would be able to lift the yellow hub. Right, yesss it is doing the job! Also notice – the lift tower moved to the rear of the robot in the right side picture. That had to happen for two reasons: For stability and also to reduce the robot’s length.

To further reduce the length, I also had to change the design of the grabber.

Now it looks like this:

I’m in the process of adding sensors and including them in the programming. For one, the Gyro sensor will make turns more precise, which is essential when one wants to plan a route on the field. Here is a bumper switch to stop the motor when the lift reaches the bottom.

After driving the robot for a while with the controller, I decided to start programming it to do the challenge autonomously. Here is the result so far… I know, there are quite a few things I can still do to speed things up and score more points, but I feel satisfied with this first attempt.




{kind=link}
{kind=link}
{kind=link}