

The previous two motor model worked, but wasn’t very stable. It was very difficult to control and it flexed a lot. Not really something I’d recommend going to a competition with.
The main problem isn’t making the mechanism work, it is making it work with the parts available in the super kit. I would really love to have the Foundation add on kit.
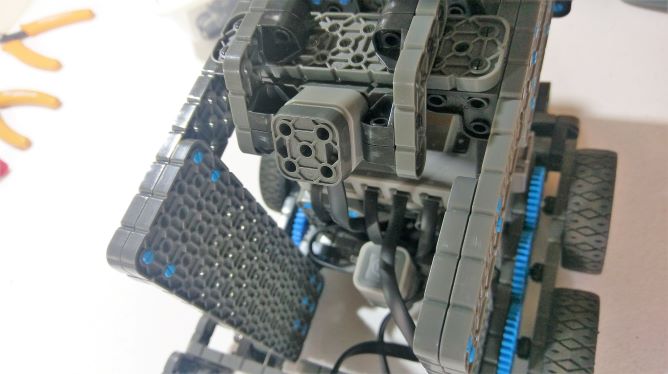
I had to switch to using the big gears, because after making the robot base, I only had two medium gears left. This was good though, as the bigger gears have extra leverage which makes the whole structure way more robust and stable.
Partly for simplicity, but mostly because of a lack of gears, I moved to a single motor design. I also decided to put the motor on the inside of the structure instead of the two motors I had on the outside on the previous model. This made the mechanism wider and less susceptible to flexing.
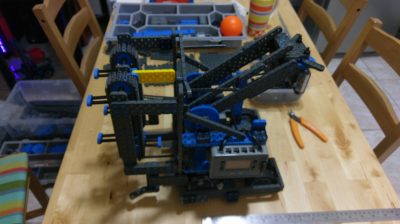
Here are the two designs side by side from the top:

Ok, enough beating around the bush, here it is in action:
There still are some things that could be improved, but I think this is a solid foundation to work with.
Be sure to check back for more on this developing story.




{kind=link}
{kind=link}
{kind=link}
{kind=link}