

My two young engineers are solving problems…
The mission for today:
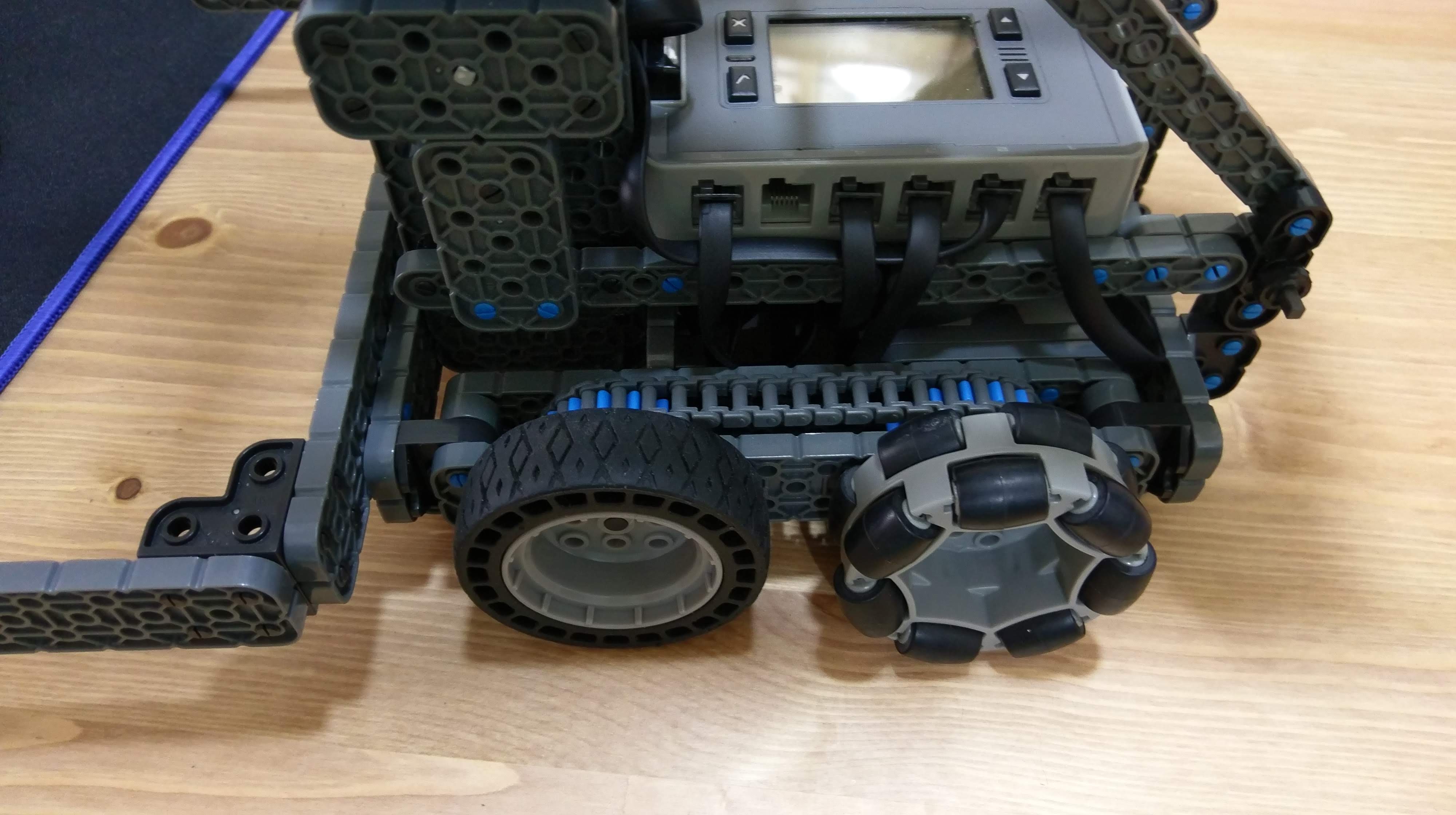
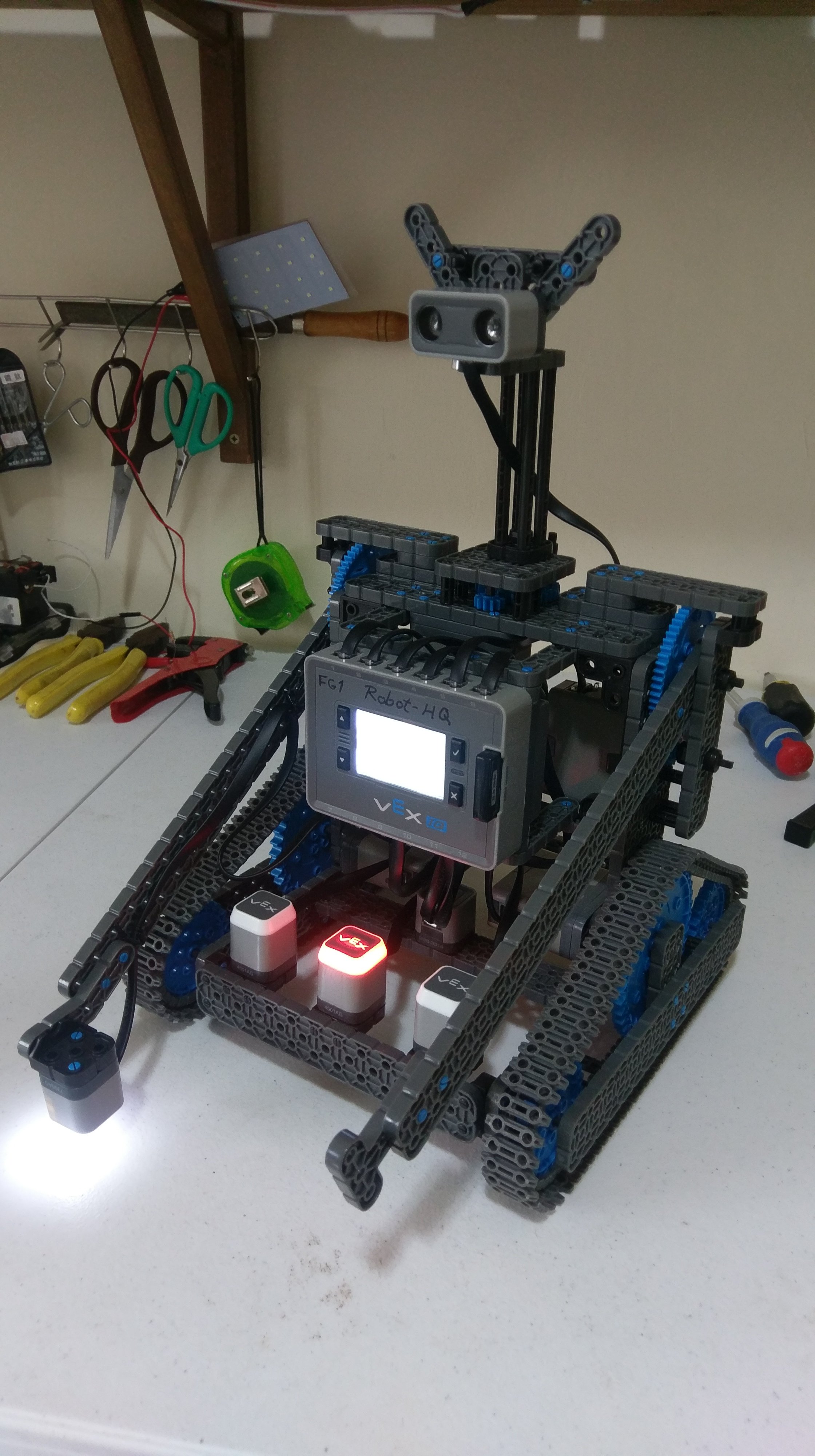
- Use the distance sensor to detect a block and stop the robot
- Use the color sensor to sort the blocks
- Green blocks to the right
- Blue blocks to the left
- Red blocks behind
It looked easy, but there were some problems to solve before the program worked, have a look:




{kind=link}
{kind=link}
{kind=link}
{kind=link}