

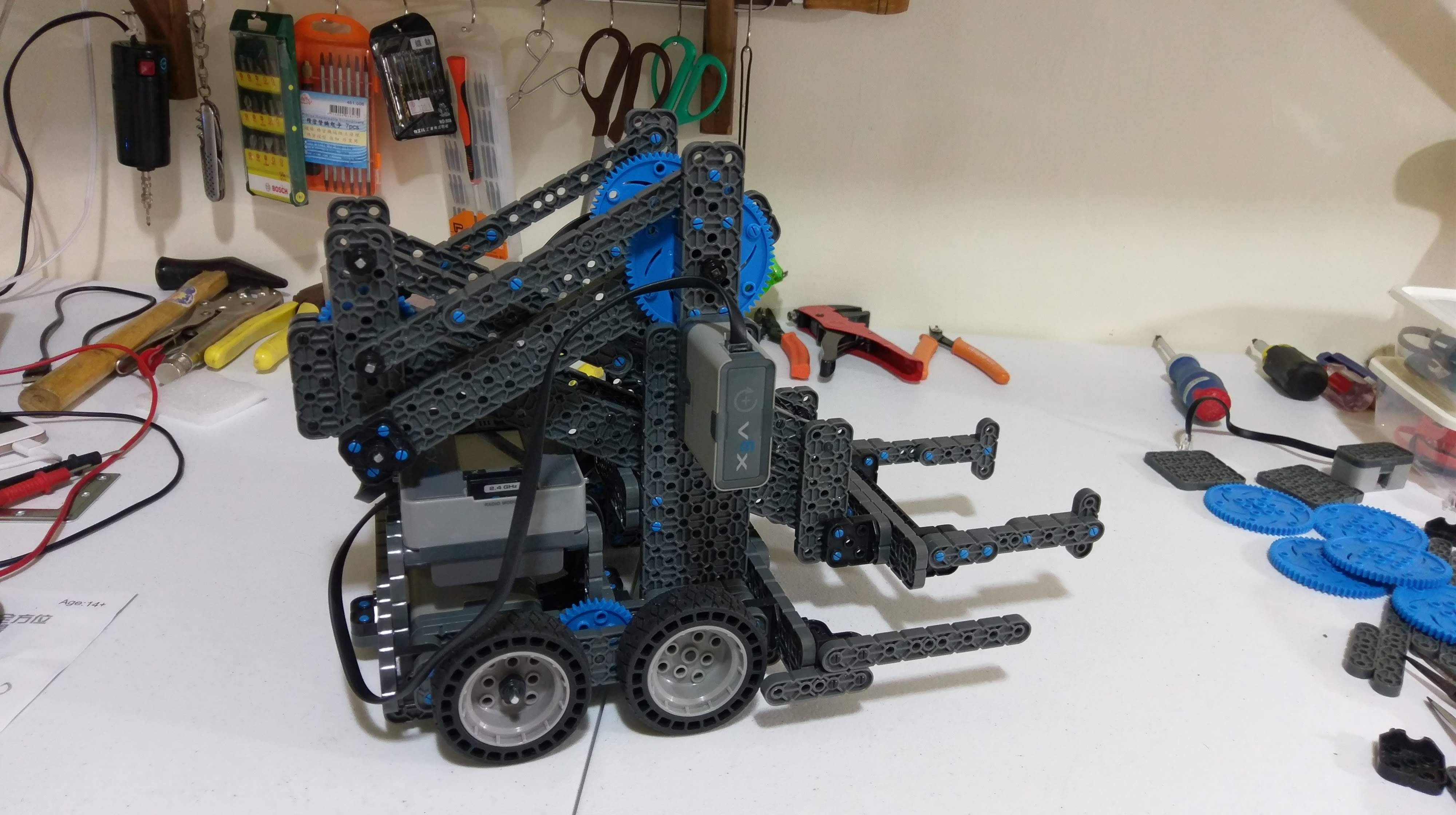
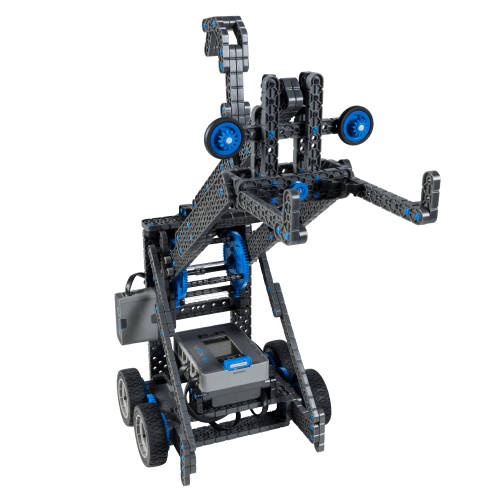
I designed this yesterday. I think it would be great to use a reverse double 4 bar for the Next Level Challenge. This one works, but it is very unstable. I’ll go back to the drawing board today. Hopefully I’ll have a functional prototype before the end of the weekend. […]
VEX-IQ
23 posts

I finally got to build a new robot. I named it 101, after the famously tall skyscraper in Taipei. As we discovered in the previous posts, the Flex robot (even after improvements) couldn’t reach high enough to pick up the bonus hubs. This wasted precious time, knocking the hub off the […]
Drive train options with the competition add on kit
The Next Level challenge also has a programming challenge part. I did a practice run on programming in the living room today. I wrote a fairly simple little program for the Flex robot to go pick up a hub, deliver it on a little mat and return to the starting […]

{kind=link}
{kind=link}
{kind=link}
The original Flex from the VEX IQ website. It is suggested as the best robot chassis to use for the 2018-2019 Vex IQ Next level Challenge. We built this robot from the instructions on the website, but found it lacking a some areas: 1: The hook design didn’t allow for […]