

I’ve been asked by quite a few people for a tutorial on how to make the 4 bar double reverse robot (Or rather – the Reverse- Double Four Bar). Seeing that I built it by trial and error, I didn’t take pictures at the time, but I took it apart […]
Next Level
6 posts

After trying to auto stack with the 4BDR design, we decided that it was too difficult to get the bonus hubs with that robot. (It was a very nice design though). I saw a YouTube video of another auto- stacker, which led to this design. No fancy four bar lift, […]

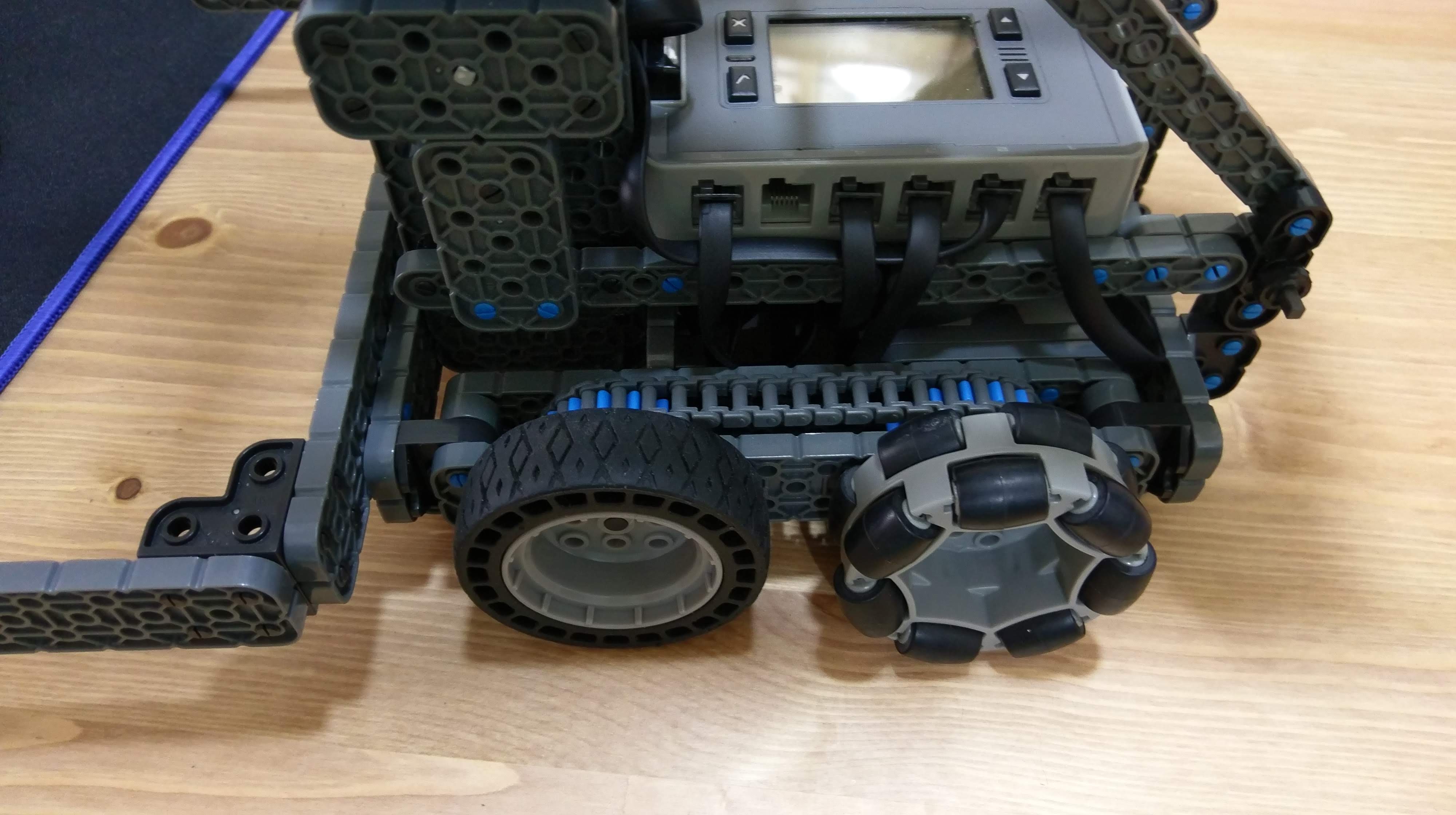
Changed the wheels on the latest prototype in order to improve driving precision. And there it goes!
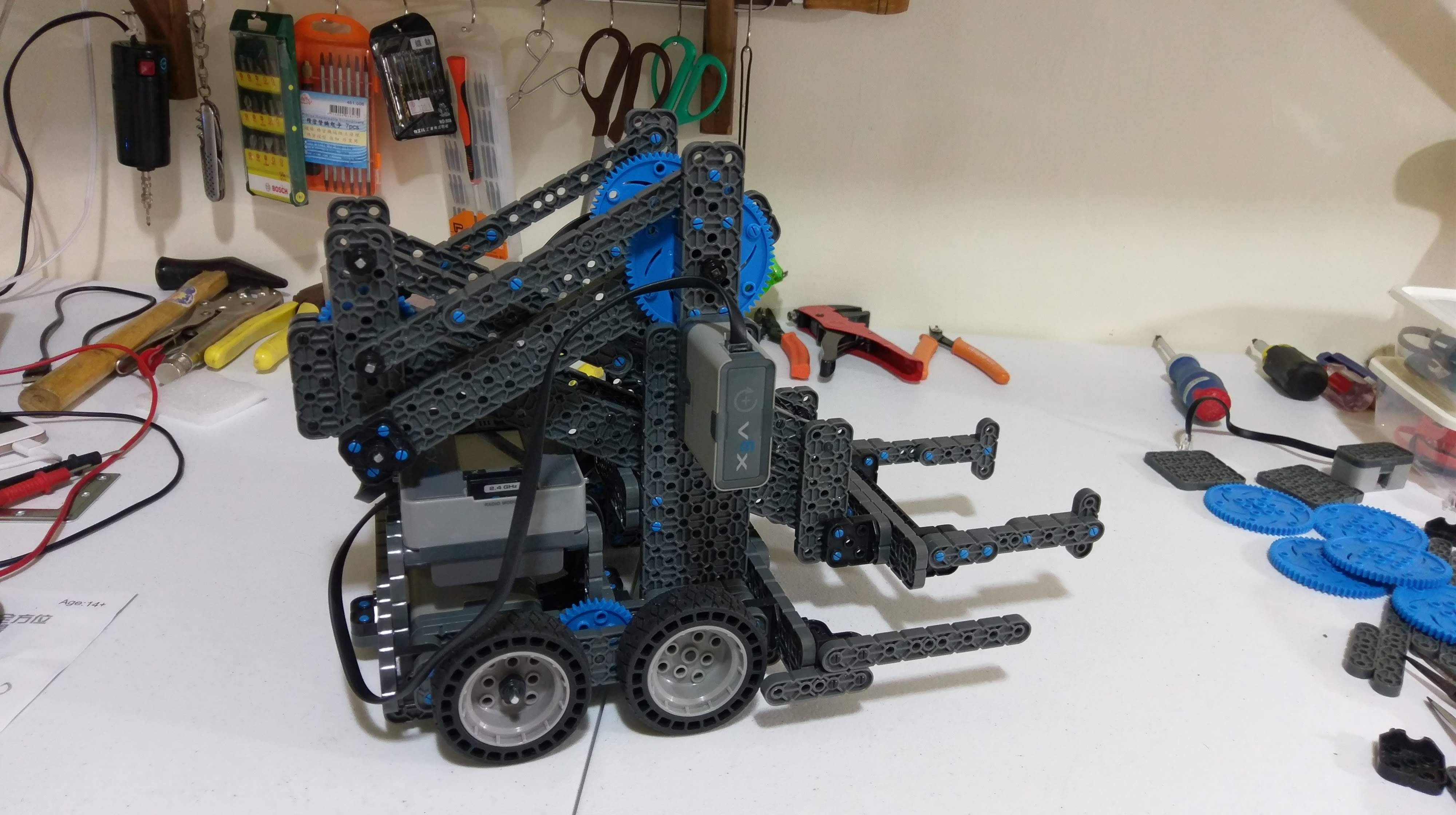
The previous two motor model worked, but wasn’t very stable. It was very difficult to control and it flexed a lot. Not really something I’d recommend going to a competition with. The main problem isn’t making the mechanism work, it is making it work with the parts available in the […]

I designed this yesterday. I think it would be great to use a reverse double 4 bar for the Next Level Challenge. This one works, but it is very unstable. I’ll go back to the drawing board today. Hopefully I’ll have a functional prototype before the end of the weekend. […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
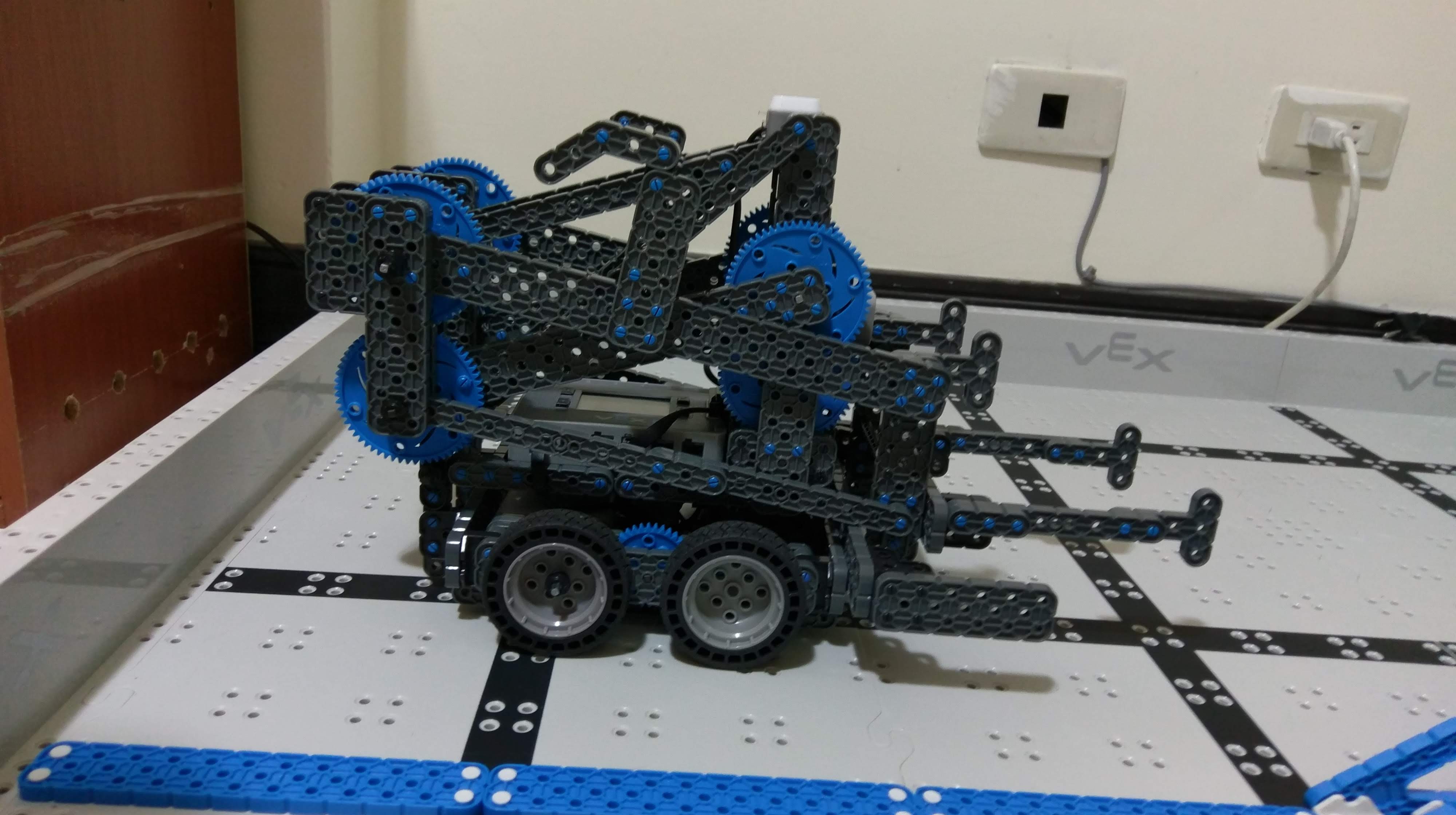
I finally got to build a new robot. I named it 101, after the famously tall skyscraper in Taipei. As we discovered in the previous posts, the Flex robot (even after improvements) couldn’t reach high enough to pick up the bonus hubs. This wasted precious time, knocking the hub off the […]