

What started as a catapult for plastic balls, turned into a paper plane launcher. We designed a launcher with fast spinning wheels, then mounted it on a regular drive base. This made it look suspiciously like an army rocket launcher… Hence the name. At first we used the controller to […]
STEM
14 posts

I looked around on YouTube for easy solutions to my lift problem: If I wasn’t careful, the lift would go past it’s usable range and break something like a linkage or a gear would pop out. Clearly I needed to add some limit switches to turn off the motor once […]

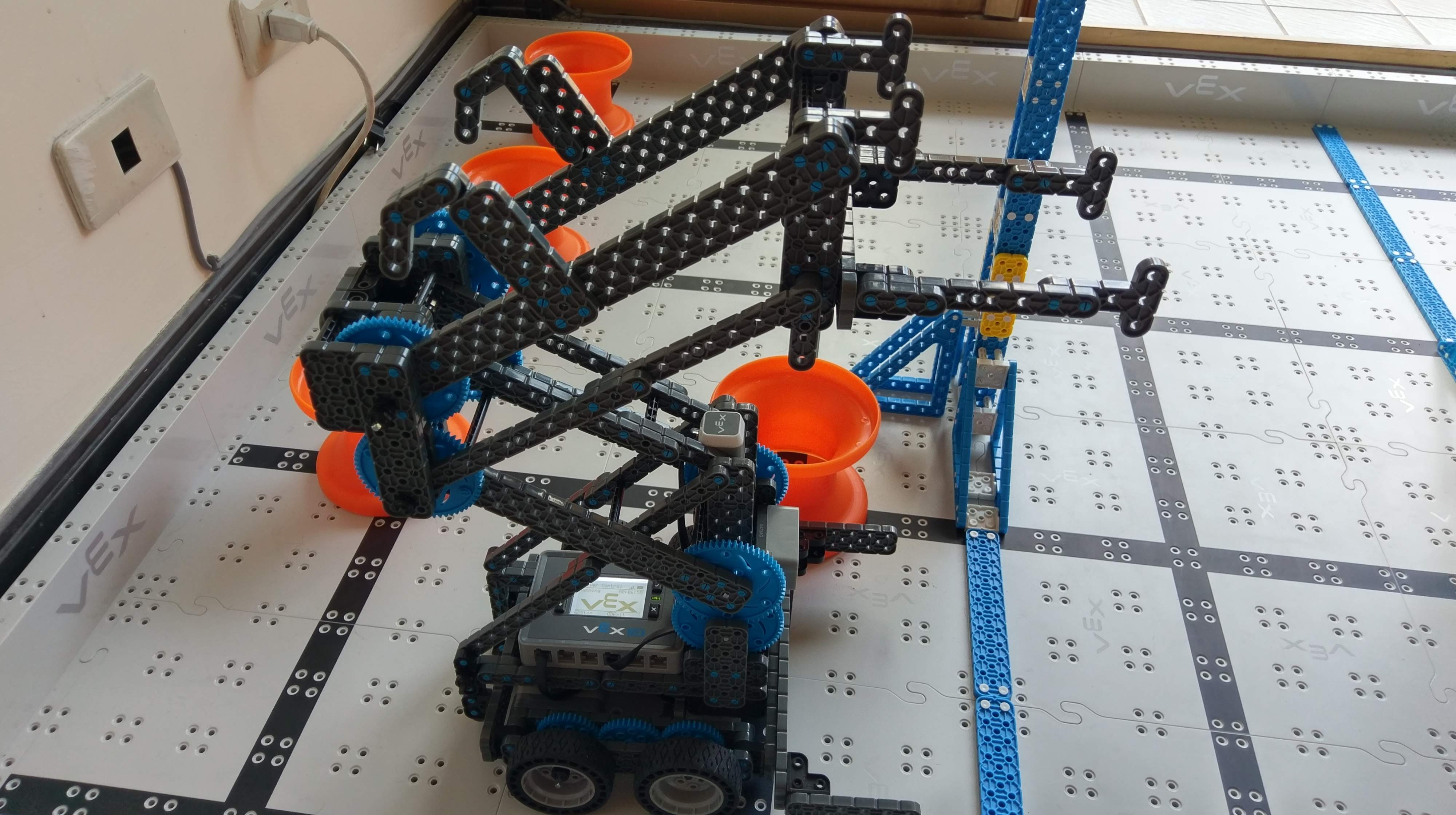
My first go at building a robot with EDR. The current EDR competition is Turning Point and one way to score points is to shoot at flags with balls. So of course I started by designing a ball puncher and a mechanism to feed it with balls. One of the […]

SYDT, the importers and re-sellers of VEX in Taiwan sent me this V5 to evaluate and build a robot. I’ll keep you updated on the robot, but here is the first glimpse of the awsome new V5!

I’ve been asked by quite a few people for a tutorial on how to make the 4 bar double reverse robot (Or rather – the Reverse- Double Four Bar). Seeing that I built it by trial and error, I didn’t take pictures at the time, but I took it apart […]

After trying to auto stack with the 4BDR design, we decided that it was too difficult to get the bonus hubs with that robot. (It was a very nice design though). I saw a YouTube video of another auto- stacker, which led to this design. No fancy four bar lift, […]

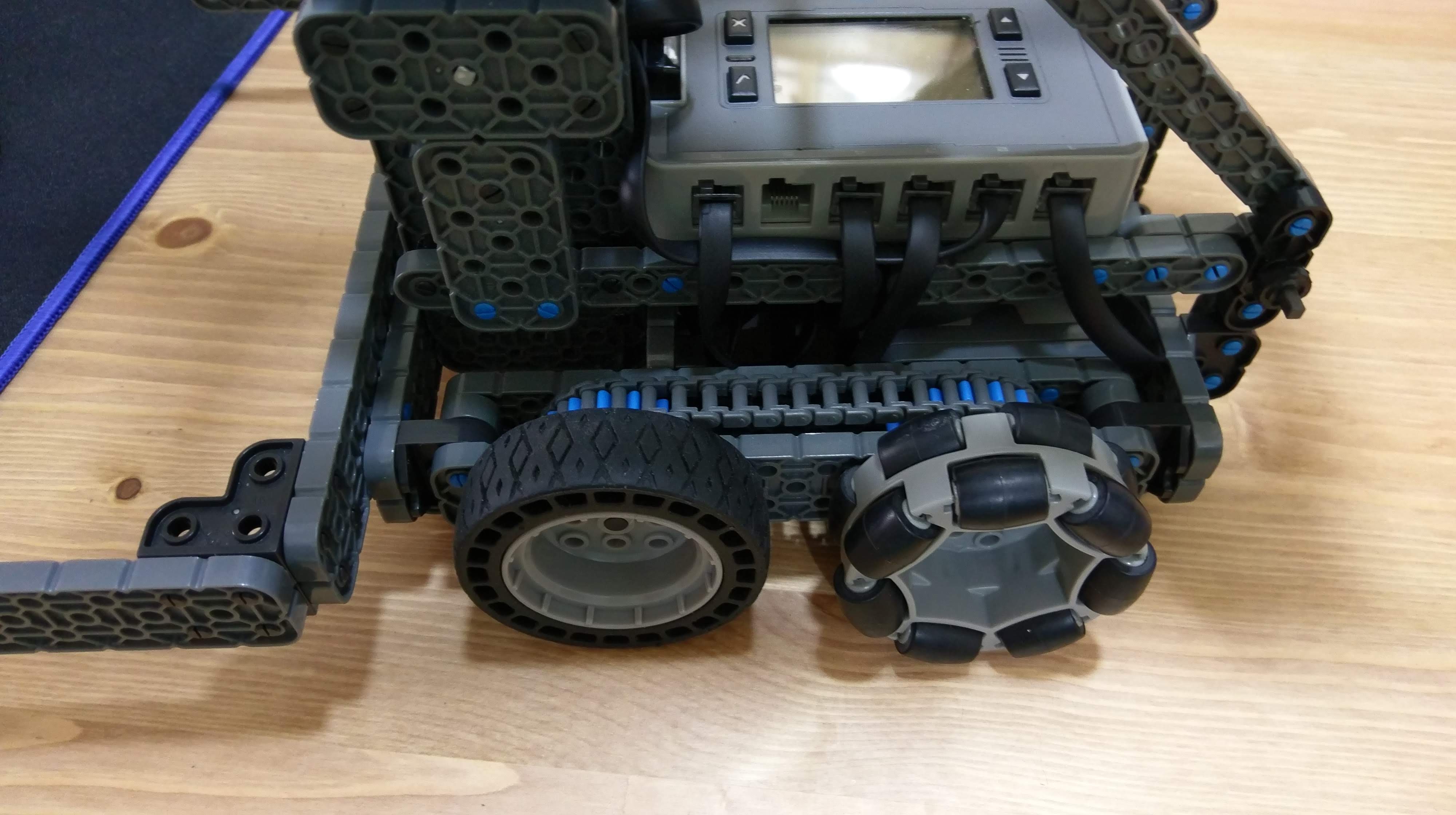
Changed the wheels on the latest prototype in order to improve driving precision. And there it goes!
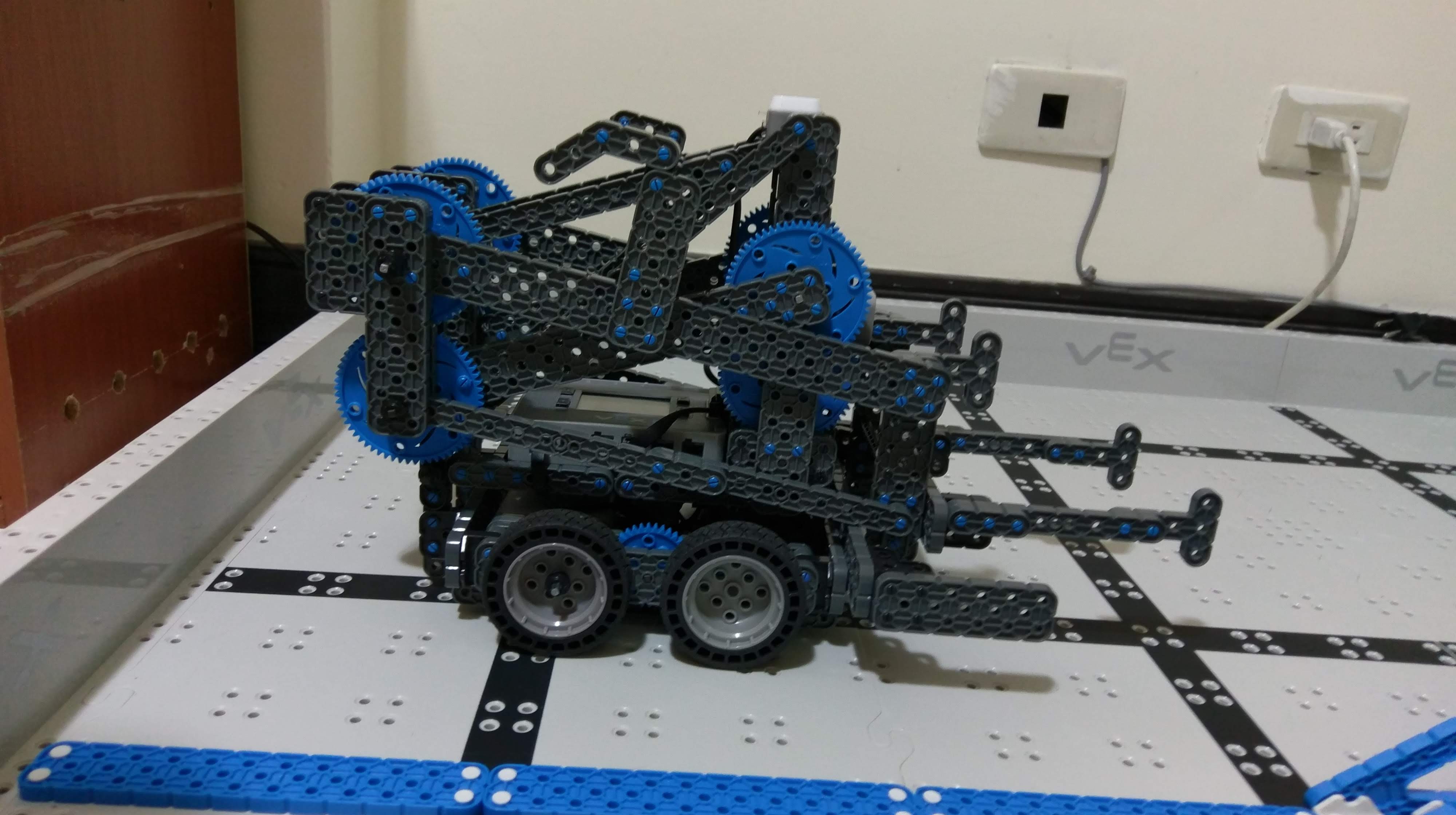
The previous two motor model worked, but wasn’t very stable. It was very difficult to control and it flexed a lot. Not really something I’d recommend going to a competition with. The main problem isn’t making the mechanism work, it is making it work with the parts available in the […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
I designed this yesterday. I think it would be great to use a reverse double 4 bar for the Next Level Challenge. This one works, but it is very unstable. I’ll go back to the drawing board today. Hopefully I’ll have a functional prototype before the end of the weekend. […]